hybrid ToFTM TECHNOLOGY
PRINCIPLE
Time of flight (ToF) refers to the time it takes for light to be emitted toward an object and reflected back. Light travels very fast, at 30 cm per nanosecond in air.
ToF sensing technology is used in a 3D depth measurement system by measuring the round-trip ToF of a light pulse in nanoseconds, giving us the shape and position of target objects.
ToF SENSING METHODS
ToF methods are generally categorized into two main types: Direct ToF (dToF) and Indirect ToF (iToF).
Conventional dToF, which is often used in LiDAR, can measure long distances across wide areas, but typically offers coarser spatial resolution. In contrast, continuous wave (CW) iToF is ideal for high-resolution shape recognition over short distances. However, it is often affected by motion artifacts and interference from ambient light, and is therefore mostly used for indoor applications.
Our proprietary “hybrid ToFTM” technology combines the strengths of both methods to achieve high temporal resolution and stable distance measurement, even in outdoor environments.
| Method | Resolution | Environment Performance | Main Applications | ||
|---|---|---|---|---|---|
| Spatial | Temporal | Range | Outdoor | ||
| dToF(LiDAR) |  |
 |
Long |

Obstacle avoidance |
|
| iToF (CW type) |  |
 |
short |

Shape recognition |
|
| hybrid ToFTM | |
 |
medium |

Outdoor applications |
|
PRINCIPLE OF “hybrid ToFTM”
TOPPAN’s hToFTM sensor employs a unique sensing method.
It combines the short-pulse type iToF method with multi-time window sensor control technology, achieving strong ambient light tolerance, minimizing motion artifacts, and enabling accurate capture of fast-moving objects even in bright sunlight.
Additionally, this sensor supports high frame rate sensing, high dynamic range (HDR) operation, and flexible working range settings to meet user requirements.
Short Pulse Type iToF Method
hToFTM adopts the Short Pulse (SP) method as its foundational technology, maximizing its powerful characteristics.
The SP method features high ambient light tolerance, making it resistant to the influence of strong ambient light. Furthermore, its low emitting duty cycle enables reduced power consumption of light sources. Moreover, even when the subject is moving quickly, it can minimize motion artifacts and blur.
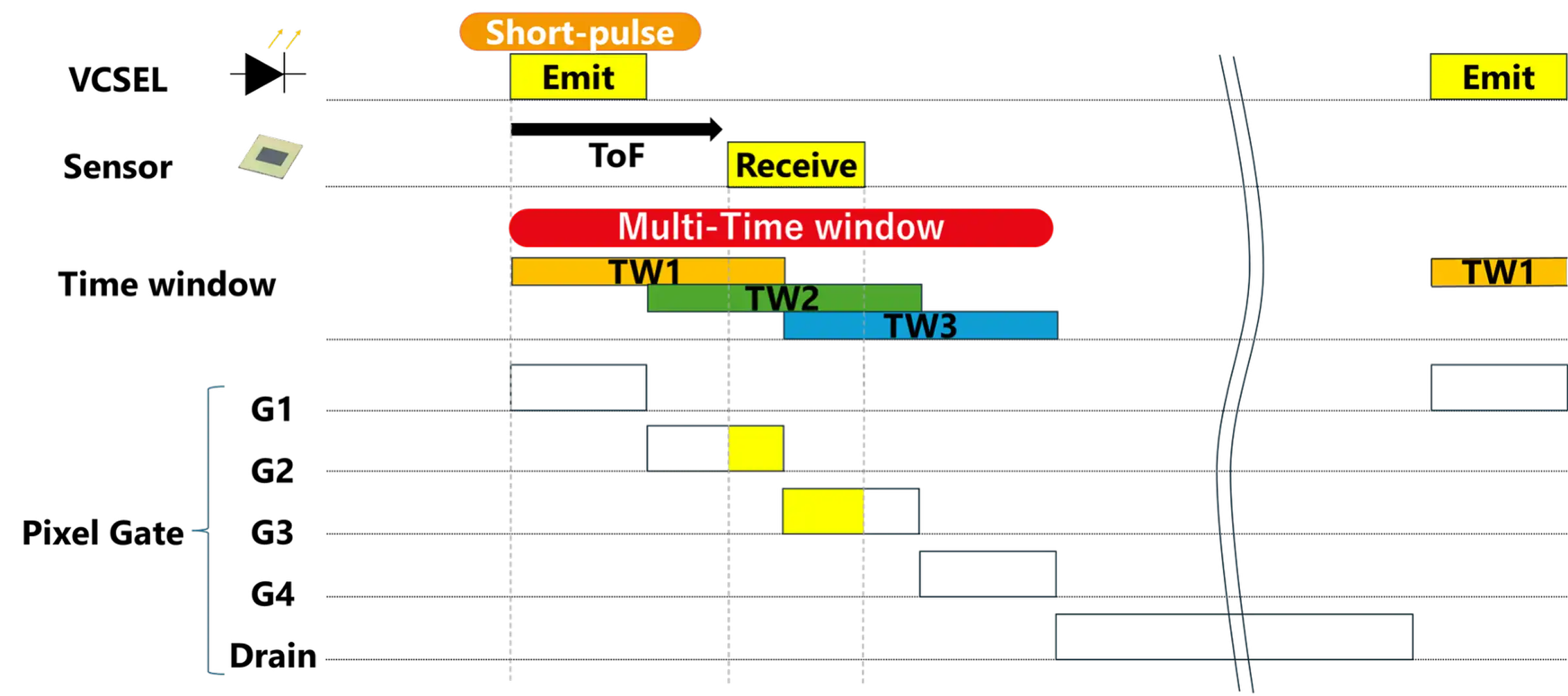
Multi-Time Window Technique
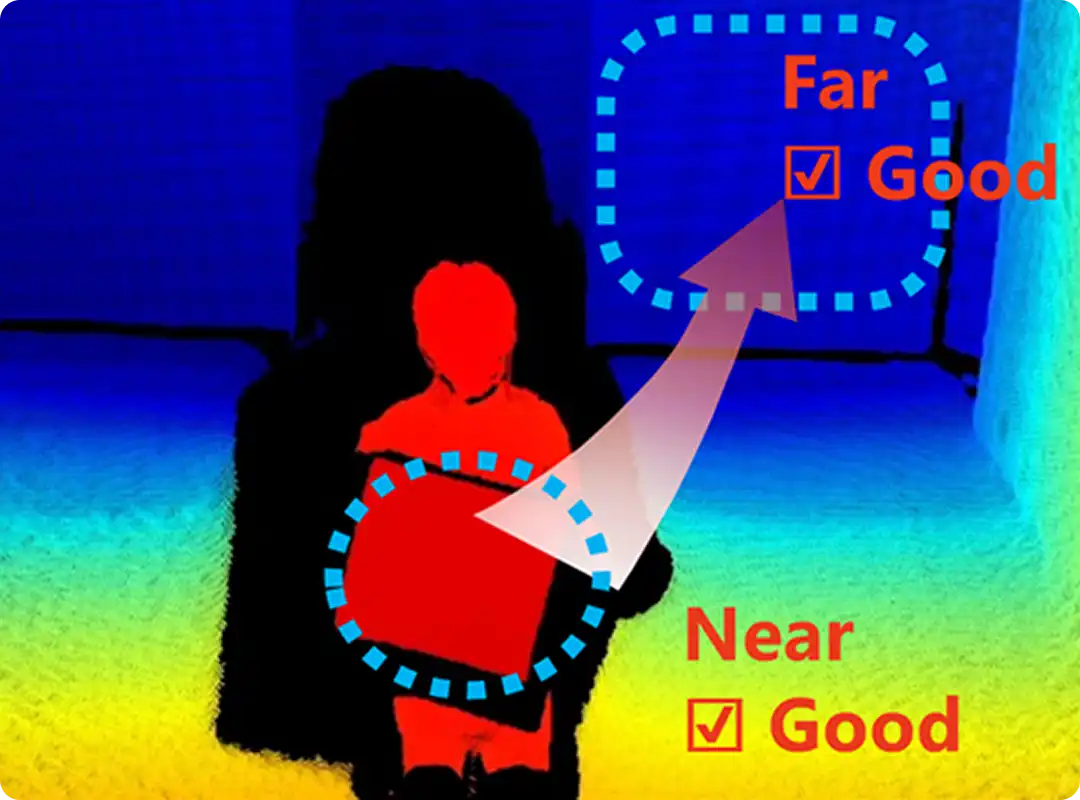
The “Multi-Time Window” technique allows the sensor to receive reflected light signals using multiple time windows from a single light pulse, which enables high-precision distance measurement across a wide range of distances.
This technique configures “Time Window (TW)” by combining the four in-pixel Gates (G1-G4). Specifically, TW1 is defined by G1 and G2, TW2 by G2 and G3, and TW3 by G3 and G4.
By receiving reflected light signals through these TWs, the system calculates distance based on the ratio of each signal. This enables accurate 3D sensing across an entire working range by measuring near-range objects with TW1, mid-range with TW2, and far-range with TW3, based on the configured working distance.
FEATURES
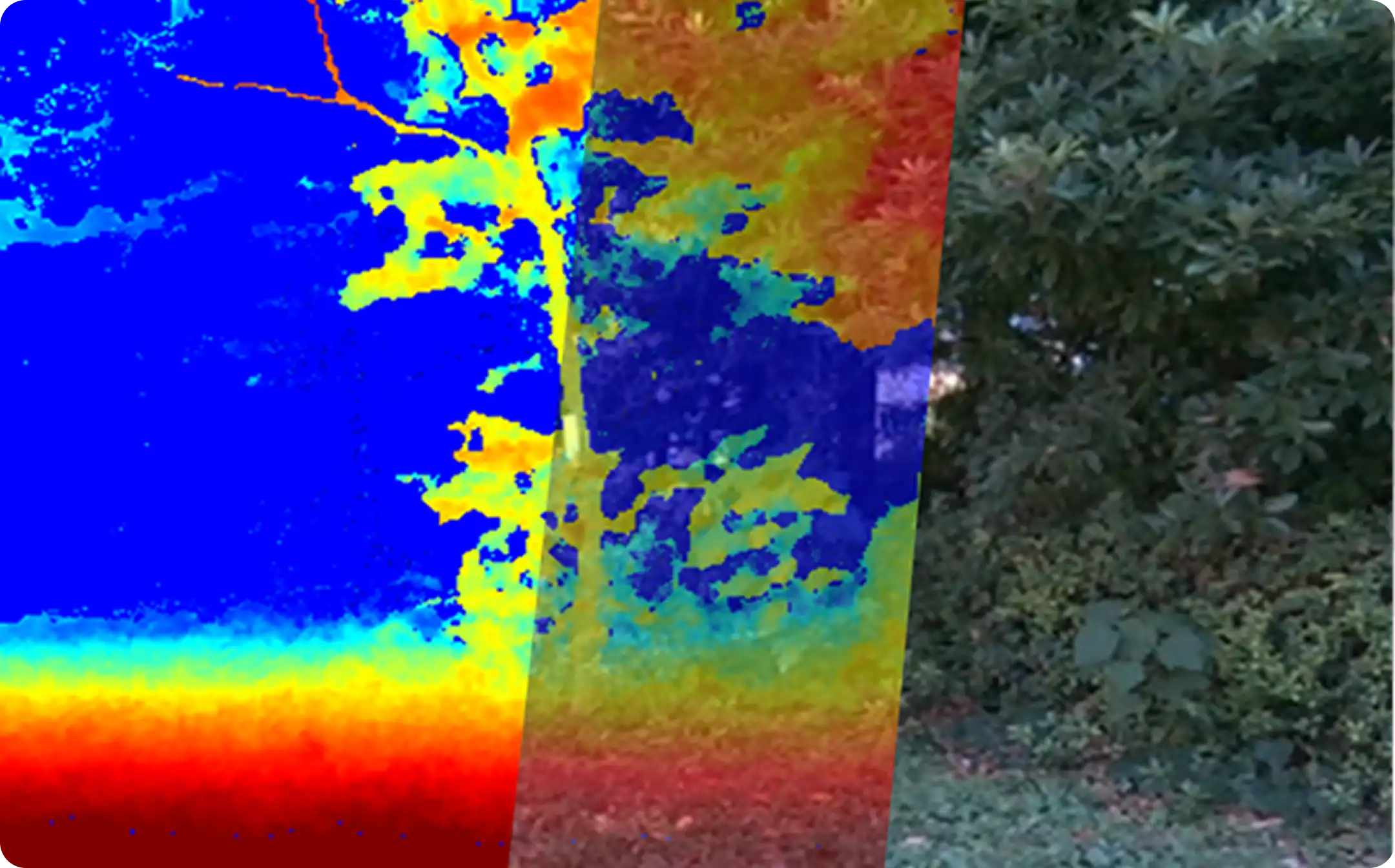
Key 01.Strong Ambient Light Tolerance
Our unique Dynamic Ambient Light Suppression (DALS) technique acquires both the modulated ToF signal and ambient light data within the same frame. This allows us to cancel the ambient light noise. The DALS technique provides high ambient light suppression capability, enabling accurate area sensing and object detection, not only indoors near a window but also outdoors (up to 100,000 lx).
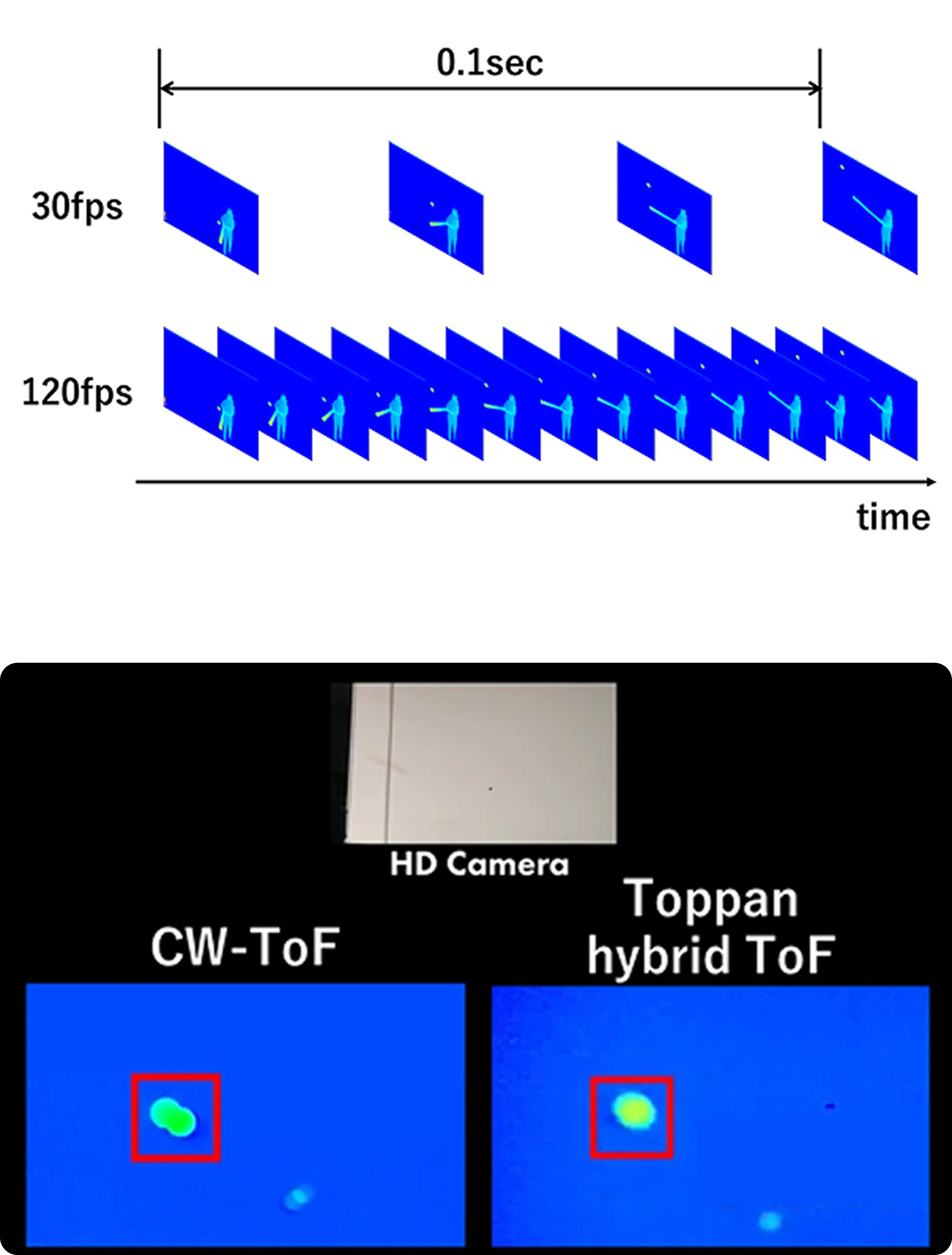
Key 02.Less Motion Artifacts And Blurs
Key 03.High Speed 3D Sensing
hybrid ToF™ effectively reduces the blur and distortion caused by fast-moving objects.
The conventional CW-iToF method requires multiple samples of continuous wave light to calculate distance, making it susceptible to motion artifacts (noise caused by motion). In contrast, the hybrid ToF™ method adopts a different approach. Based on short pulse modulation, it emits a single pulse of light and captures its reflection in multiple time windows. Since distance can be calculated from a single frame, it suppresses motion artifacts and blurs and also enables operation at high frame rates.
Key 04.User-Friendly Settings
The combination of TOPPAN’s hybrid ToF sensor and our unique operations enables a variety of features for 3D sensing. For instance, the Range Shift technique allows the working range to be flexibly adjusted based on the user's environment and application, as well as HDR with no compromise on the frame rate.
APPLICATIONS
-

Robot Vision(AGV/AMR)
-

Drone
-

Factory Automation
-

Gesture UI
-

Humanoid
-

Smart Farm
senSPureTM 3D ToF Products
-

ToF Camera
Perfect for customers who want to use or evaluate hybrid ToFTM technology immediately. Ready-to-use finished camera products.
-
ToF Sensor
If you wish to develop custom solutions or need data sheets for sensor integration, please contact us here.
