「GATEWAY Tech TAKANAWA」 出展報告
2026年5月13日~14日に開催された「GATEWAY Tech TAKANAWA 2026」において、弊社ブースにお立ち寄りいただいた皆様に心より感謝申し上げます。TAKANAWA GATEWAY CITYの街パートナーとして、TOPPANは「モビリティ、ロボット」をテーマに、社会課題解決とオープンイノベーションを推進する3D ToFセンシング技術を展示しました。
また、本イベントではブース展示にとどまらず、ピッチ登壇の機会もいただきました。独自の「hybrid ToF™」技術が、いかにして未来の都市インフラや自律移動体の安全性と効率性を高められるかについて解説し、出資や事業連携を検討するVC、スタートアップ、事業会社など、多くのイノベーターの方々と今後の展望を共有できたことを大変嬉しく思います。

Table of Contents
貴社でこのような課題はございませんか?
- 測定環境に合わせて、複数の異なるセンサを使い分けるのが手間…
- 屋外や窓際だと太陽光の影響を受け、測距データが白飛びしてしまう…
- 足元の障害物検知と、遠くの人物認識を1台のカメラでスマートに両立したい…
独自のハイブリッドToF™技術 | 3つの強み
- 圧倒的な外光耐性:
独自技術「DALS」により環境光ノイズをフレーム内でキャンセル。窓際や直射日光下の屋外(最大10万ルクス)でも、白飛びせず安定した測距データを取得できます。
- 遠近同時測距:
HDR機能で近距離の飽和と遠距離の信号不足を同時に解決。0.5mから7.0mまで、フレームレートを落とさず1台のカメラで全域カバーします。
- 高速移動に強い:
モーションアーチファクト(残像)を極限まで低減。最大120fpsでのデータ出力に対応し、高速で移動するロボットや周辺物体を、見逃すことなく正確に捉えます。
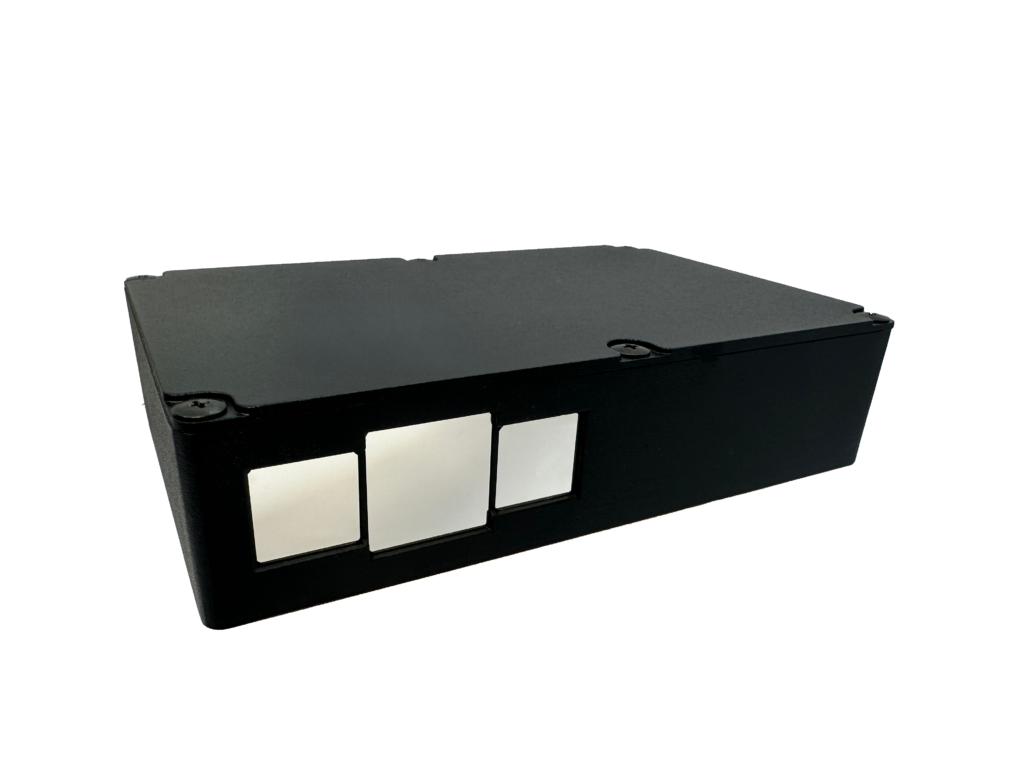
ブースにてご紹介した「C11U」の実機デモ
当日ご紹介いたしましたデモは、C11Uが持つ3つの強みに加え、Depth / IR / Point Cloud の3つの同期データ出力を活用し、1台のカメラで2つの異なるアプリケーションを同時に実行するものでした。
1. 骨格検知
IR & Depth データから、近距離の人物を認識し、3D関節座標を特定。
2. 障害物検知
Depth データから障害物候補を抽出し、Point Cloud 座標を参照して指定エリアの障害物を判定。
実環境におけるロボットの眼の高度化や、屋内外を問わない安全検知ソリューションの実現に向けて、3製品への組み込み、詳細仕様の確認、検証用SDKのご要望などがございましたら、どうぞお気軽にお問い合わせください。