We would like to introduce our exhibit at the RoboDex held from January 24 to 26, 2024, at Tokyo Big Sight. Our company showcased the newly developed ‘hybrid ToF(hToF) Camera,’ equipped with the hybrid ToF Sensor TPHT4030A. We presented the High Dynamic Range (HDR) technology utilizing this 3D ToF camera. Additionally, we conducted demonstrations of a robot control system using both the camera and its dedicated Software Development Kit (SDK).
-Contents-
3D ToF HDR technology demonstration
Exhibit Panel
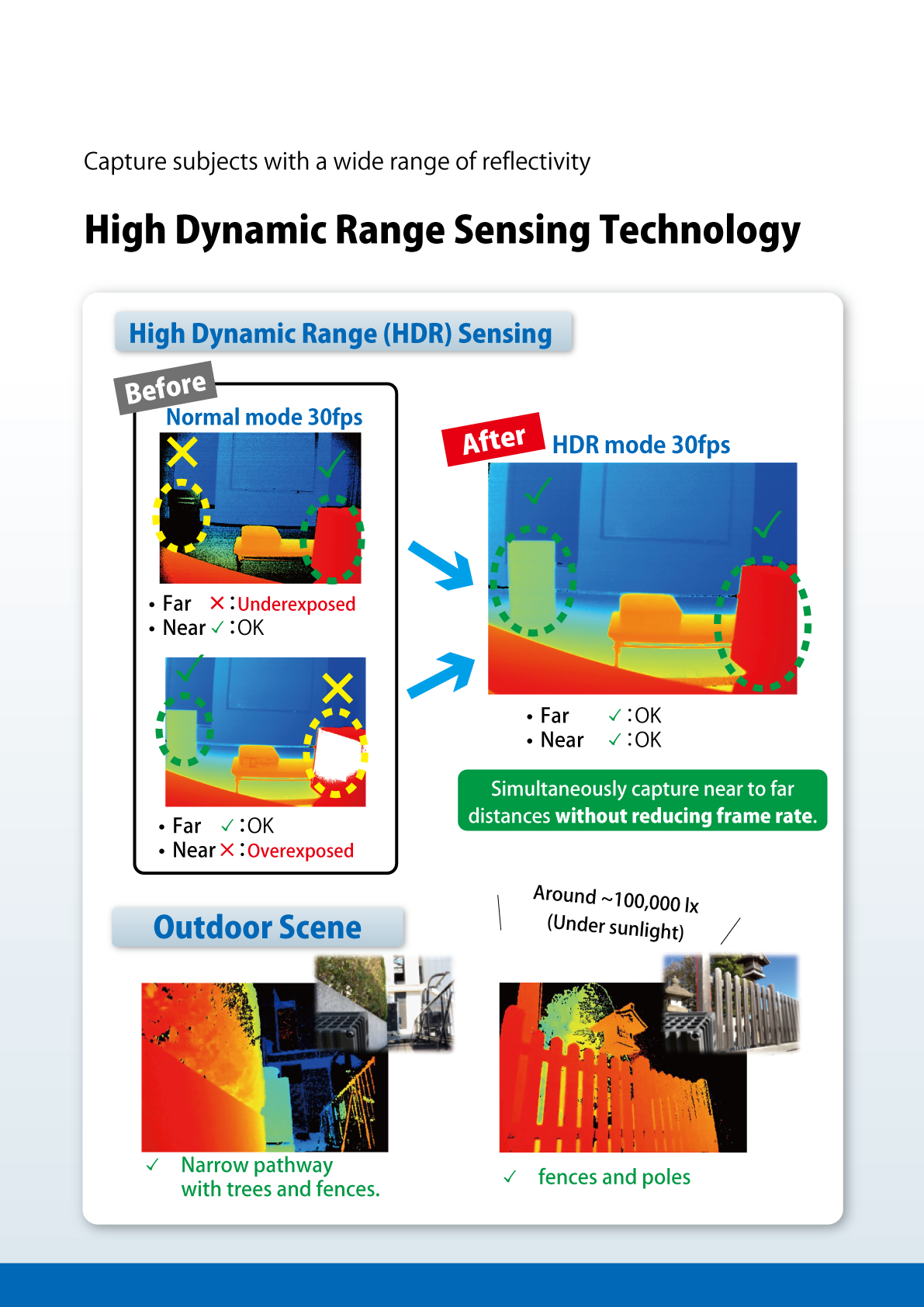
Exhibit Introduction

This demo uses two 3D ToF cameras and put them side-by-side and operating at the same time. To compare the HDR effects, one operates in a normal mode, while the other is in HDR (High Dynamic Range) mode.
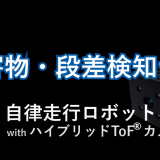
In this environment, 3D sensing is performed from close distance to about 7 meters away. At close range, a checkerboard pattern board with high and low reflective surfaces is placed. For sensing to far distances with a ToF camera, it is usually necessary to increase the number of ToF light pulses emitted for measuring. However, this can cause the ToF signal observed by the sensor to become too strong (signal saturation/overflow) when a short-range, highly reflective object enters the camera’s field of view, making accurate distance measurement difficult.
In this demonstration, 3D sensing is performed under the challenging conditions described above. When look the comparative images, white spots indicative of signal saturation are visible on the left side of the infrared (IR) image. Observing these same spots in the depth mage (distance color map) reveals misidentified distances due to signal saturation or differences of reflectance. Looking at a checkerboard pattern board in the depth image, there distance values should normally be similar, but a check pattern which means large depth errors appears in the depth image.
Meanwhile, what about the depth image in HDR mode?
The HDR mode correctly measures a depth of the checkerboard pattern board, where depth measurement was unsuccessful in the normal mode. The IR image generated by the HDR fusion shows that the spots with signal saturation have been minimized. This results in an expanded signal dynamic range for measuring. Our HDR method uses a pixel pixel line binning based HDR technology. For details, please refer to this article.

I just wanted to add something else.
Like I said earlier, we’ve got two cameras going side by side in this demo setup and run them at the same time….wondering about signal interference between ToF cameras?
Yes, one of the important features of TOPPAN’s hybrid ToF camera is that there is no ToF signal interference among multiple ToF cameras..
Autonomous Robot Control Demo with hybrid ToF Camera and SDK
Exhibit Panel
Exhibit Introduction
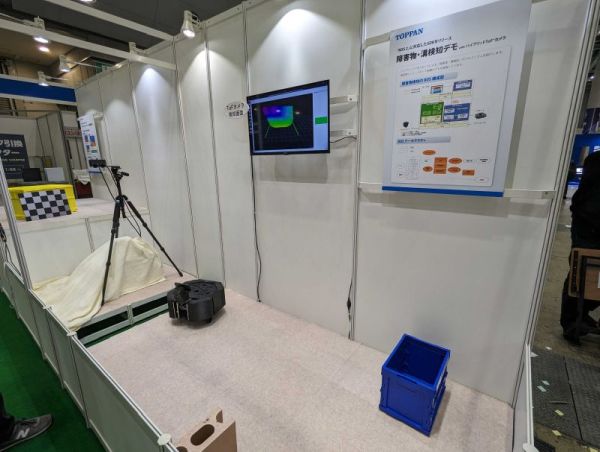
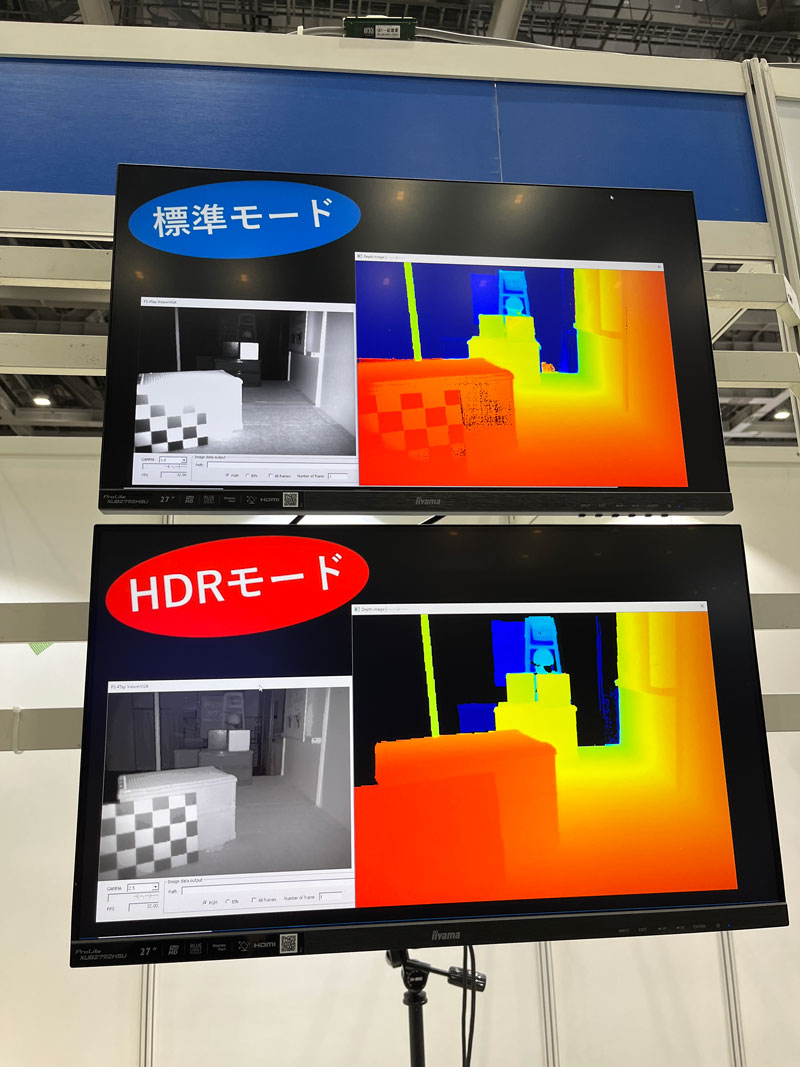
In this demonstration, our hybrid ToF camera system has been embedded in a commercial educational/research robot (TurtleBot 3) for obstacle detection. When the ToF camera detects an obstacle, wall, or ditch, the robot stops and turns in simplified control. The application for this demonstration was developed with a TOPPAN ToF SDK (Linux/Ubuntu) for ROS 2.
To demonstrate obstacle detection using a 3D sensing images from the ToF camera attached to the robot are displayed on the monitor in real time.
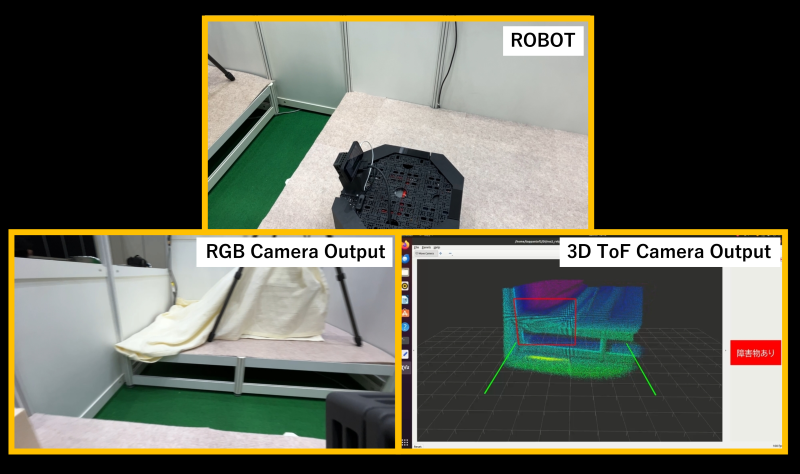
The following is the Pointcloud video captured by the 3D ToF camera.
The areas identified as an obstacle or a ditch are indicated in the image with a red window alert. When an obstacle or ditch is detected by the ToF camera, the robot is immediately instructed to perform an action (obstacle detection → Stop and Rotation).
Using our dedicated SDK simplifies the control of our 3D ToF camera and acquire depth and IR data, thereby reducing the preparation and development effort for users.
If you have any questions about the exhibits, please feel free to contact us.
Editor
TOF Business Development Center
Business Development Division
Hiroki Ogawa