

2024年1月24~26日に東京ビッグサイトで開催されたロボデックスでの展示の様子を紹介します。当社は、ハイブリッドToF®センサTPHT4030Aを搭載した新開発の「ハイブリッドToF®カメラ」を出展しました。その3D ToFカメラを使用したを使用したハイダイナミックレンジ(HDR)技術紹介や、本カメラと専用のSDKを使用したロボット制御システムのデモンストレーションを行いました。
-Contents-
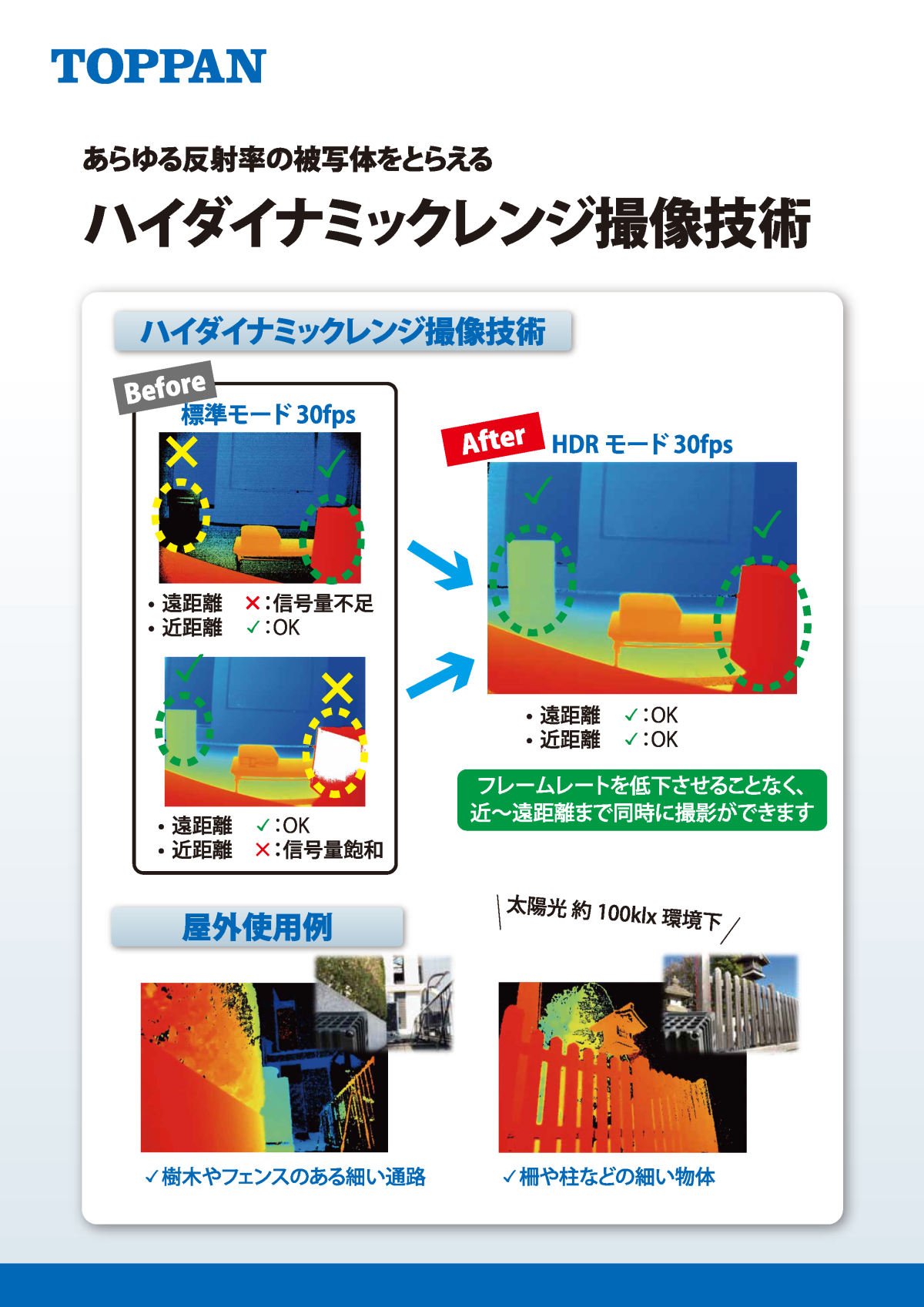
ハイダイナミックレンジ技術デモ
展示パネル
展示内容紹介

このデモでは、2台の3D ToFカメラを横並びにして同時に駆動させています。一台は通常モードで動作し、もう一台はHDR(High Dynamic Range)モードで動作しています。目的は、これら二つの異なるモードでのダイナミックレンジの拡張効果を比較することです。
撮影環境の設定として、近距離には高反射率と低反射率の表面を持つチェッカーパターンボードを配置し、さらに約7メートルの距離まで3Dセンシングが可能な条件を作り出しています。通常モードのカメラでは、遠方までセンシングするためには、測定光パルスの発光回数を増やす必要があります。しかし、これにより近距離にある高反射率の物体がカメラの視野に入ると、センサで観測される信号が強くなり過ぎ(信号飽和)、正確な距離測定が困難になる可能性があります。
このデモでは、このような厳しい条件下での動作を敢えて設定しています。比較画像を見ると、近赤外画像(IR画像、写真の左側)で白飛びしている箇所があります。距離画像(カラーマップ)でそれらの箇所を見ると、信号飽和や反射率の違いにより距離が誤認識されていることを示しています。特に、チェッカーボードを距離画像でみると、通常はおおそよ同じ距離値になる必要がありますが、チェック模様が浮かび上がっており、つまり物体表面の反射率の違いによって正しく距離計測できていないことを示しています。
一方、HDRモードの距離画像はどうでしょうか?
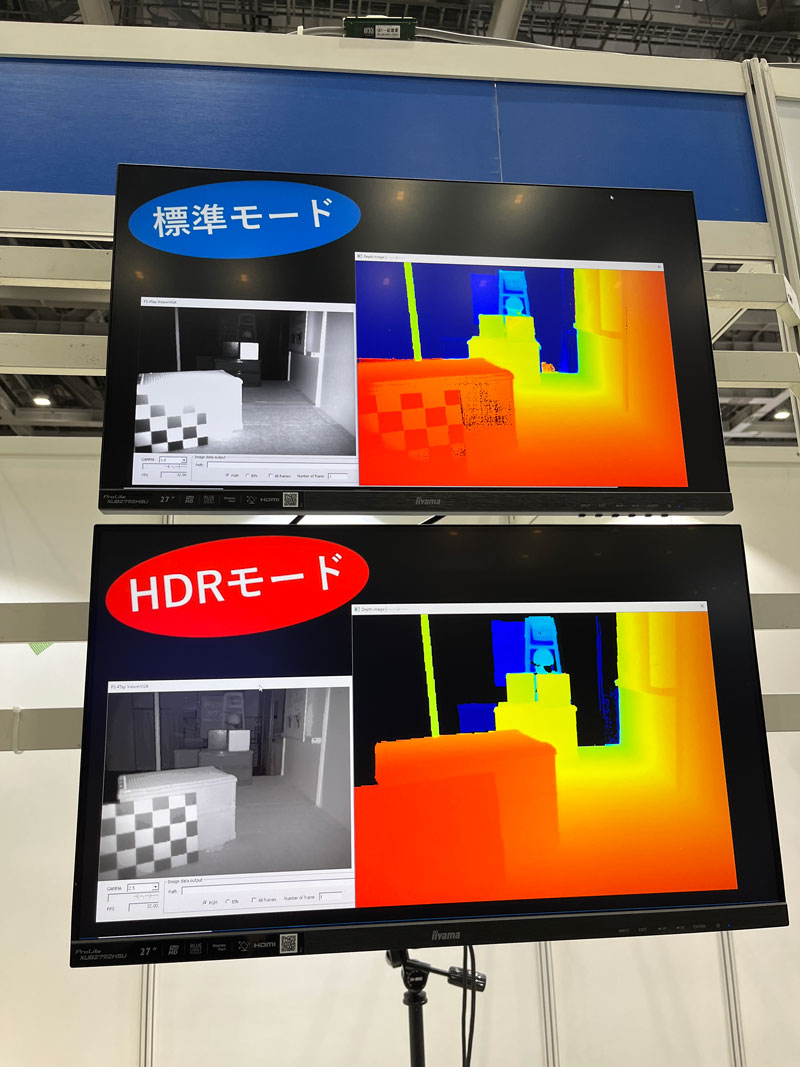
HDRモードの場合、近距離から遠方までしっかり距離計測できていることがわかります。通常モードでは距離計測ができていなかった近距離にあるチェッカーボードの表面も正しく計測できています。HDR合成した近赤外画像を見ても、白飛びしている箇所が減っていることから計測に使用できる信号ダイナミックレンジが拡大していることがわかります。本HDR方式は、ラインビニングによるHDR方式を採用しており、HDR駆動をおこなってもフレームレート低下がないという特長をもっています。詳細については、こちらの記事を参照ください。

ちなみに、上記デモの環境は「2台のカメラを横並びで同時に駆動させています」と文頭に書きました。これだけでToFカメラの原理に詳しい方はピンと来たかもれません。TOPPANのToFカメラは、カメラ同士の信号光干渉が発生しないのも重要な特長の1つです。
ハイブリッドToF®カメラ+SDKによる走行ロボット制御デモ
展示パネル
展示内容紹介
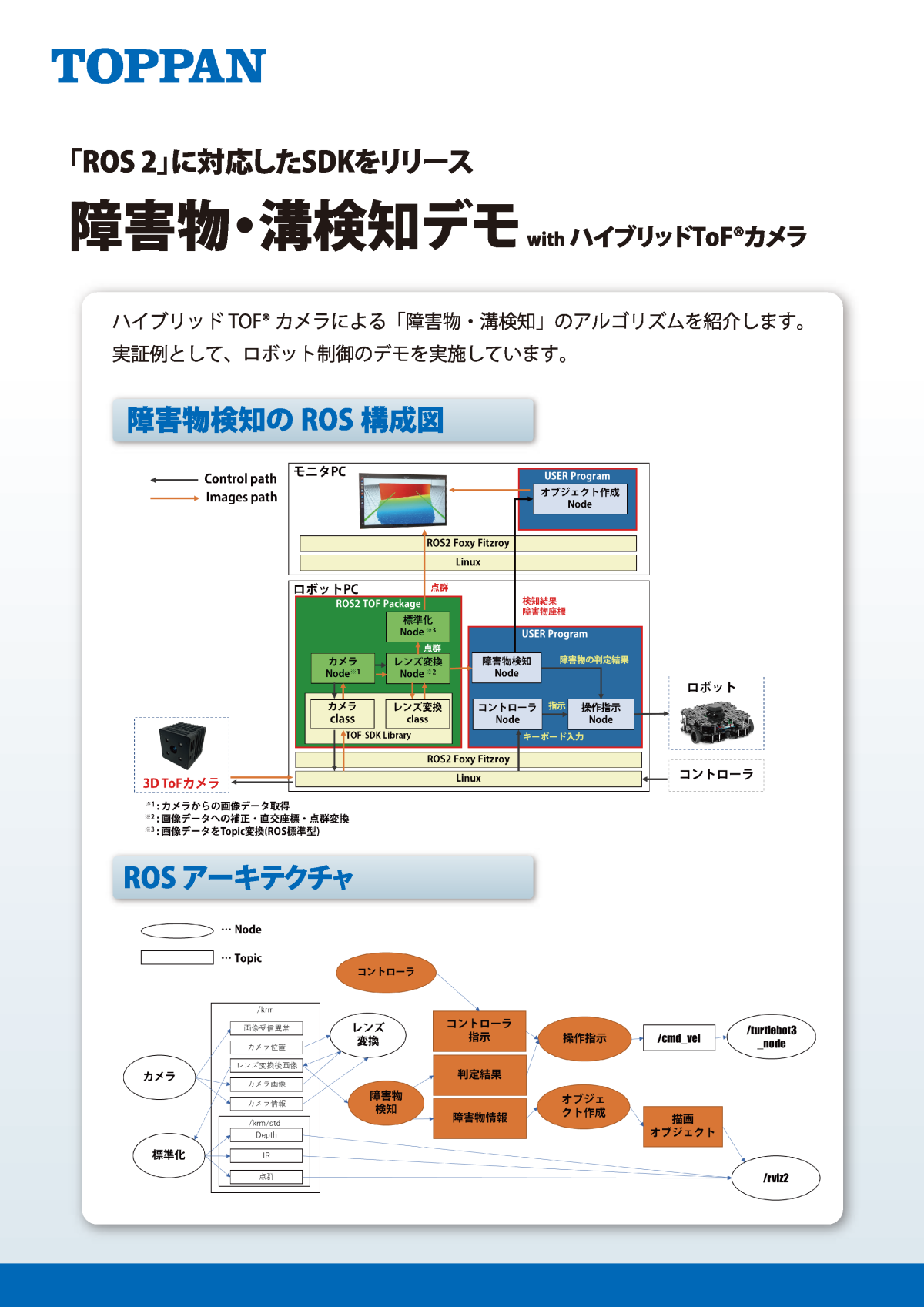
当社のハイブリッドToF®カメラのシステムを市販の教育・研究用ロボット(TurtleBot 3)に組み込み、障害物検知を行ったデモです。
ToFカメラの視野にある障害物や壁、溝を検知すると、ロボットが停止して旋回するという簡易的な制御を行っております。このデモのアプリケーションはROS 2に対応した専用SDK(Linux/Ubuntu)を用いて開発されました。
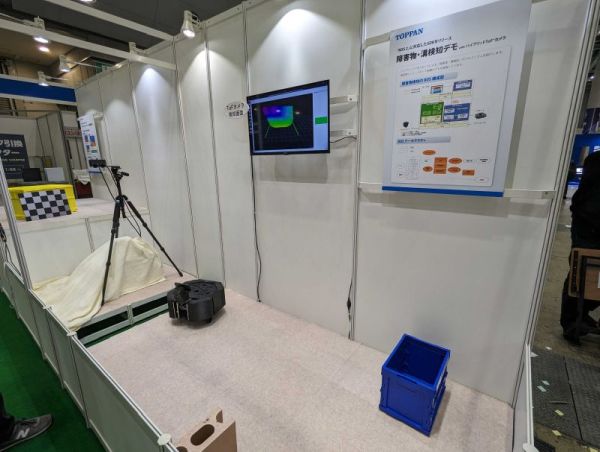
自走ロボットに取り付けた3D ToFカメラを使用して障害物検知を行っていることを示すためにブース内にモニタを設置して、ロボットに取り付けたToFカメラからの映像をモニタにリアルタイム表示させています。
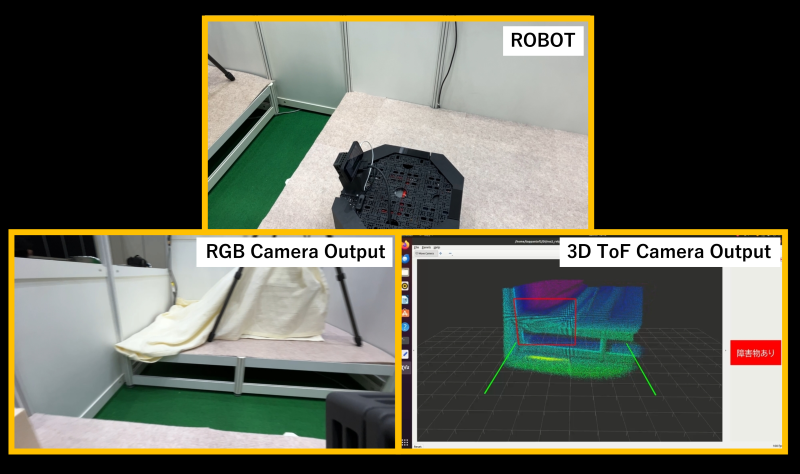
自走ロボットに搭載したToFカメラのPointcloud動画です。
障害物あるいは溝と認識された箇所を赤枠で表示しています。ToFカメラによって障害物や溝を検知するとすぐにロボットへ動作指示(障害物検知→ロボット停止→ロボット回転)をして、ロボットをコントロールしています。ロボットの構成、ROS2による処理アーキテクチャやアルゴリズムについては展示パネル内をご参照ください。
専用SDKを使用することで、当社ToFカメラの動作制御やToFカメラから出力される距離データの取り込みなどが容易になり、ユーザーの開発環境に当社ToFカメラを組み込む負担を削減します。
展示内容についてご質問等ございましたら、お気軽にお問い合わせください。
執筆者
事業開発本部
TOF事業推進センター 事業戦略
小川広記

