
TOPPAN INC. (TOPPAN) participated in the Image Sensing Show 2023 (ISS2023). We are delighted to announce that many people visited our booth during the event and are honored to have received the 2023 Best Booth Award from the organizers. Thank you very much for visiting us. In this article, we will briefly report the highlights of our exhibition.
| Name of Exhibition | IMAGE SENSING SHOW 2023 |
|---|---|
| Period | June 14 (Wed.) through 16 (Fri.), 10:00 a.m. – 5:00 p.m. |
| Venue | PACIFICO YOKOHAMA |
| Concurrent Events | 29th Symposium on Sensing via Image Information |
“20m Sensing with hybrid ToFTM Camera” Demonstration
Reference Exhibition

The real-time depth information captured by the hybrid ToFTM camera is displayed on a wall-mounted screen. The color representation on the display indicates red representing near distances and deep blue representing 20m or more away. An outdoor demonstration experiment using our hybrid ToFTM sensor has successfully achieved measurements of objects (panels) located 20m away.
BTW, I was surprised that the Google Pixel7 camera can see light at 940nm wavelength….!
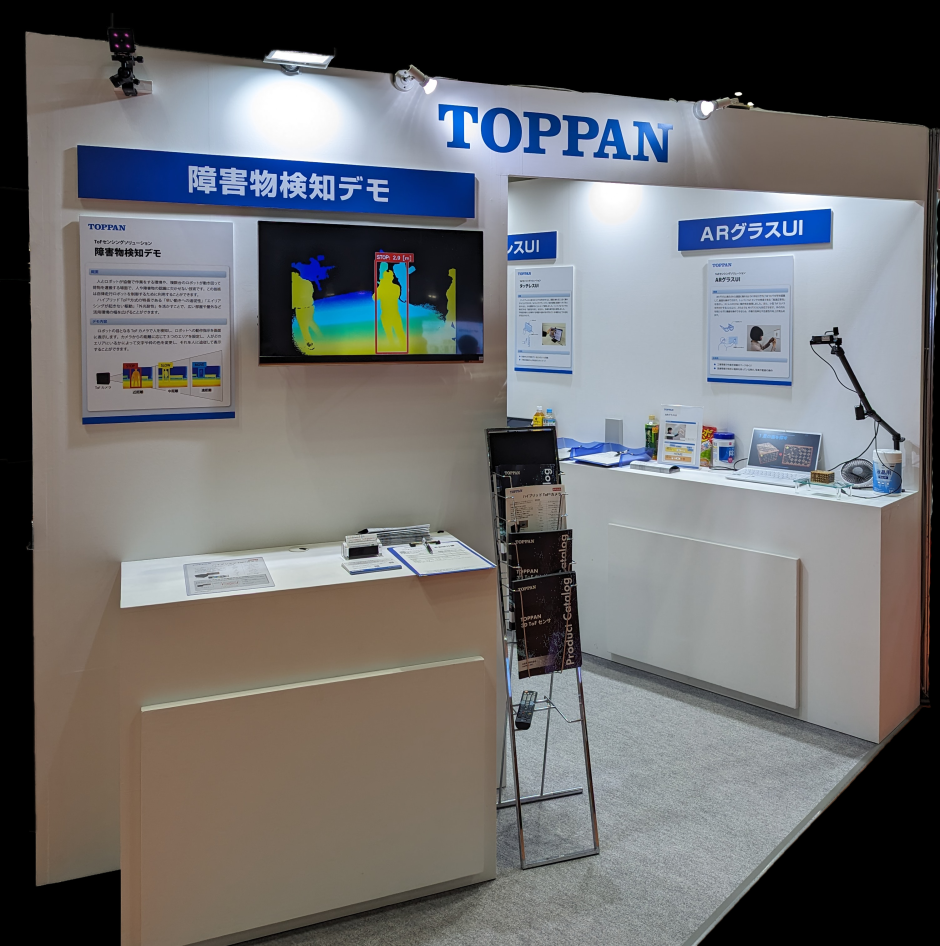
“Obstacle Detection” Demonstration

As a proof of concept of utilizing the Robot Operating System 2 (ROS 2) compatible SDK, designed for robotics development, we will showcase an “Obstacle Detection” application for autonomous robots. This application utilizes the TensorFlow software library. Leveraging the strengths of TOPPAN’s hybrid ToFTM sensor, which includes robustness in motion, the ToF camera recognizes the 3D position of individuals captured in its field of view and displays motion instructions to the robot.
By detecting people using the ToF camera, acting as the robot’s “eyes”, the system displays motion instructions on the screen. Three different areas are defined based on the distance from the camera, and the color of the text and frames changes depending on the person’s distance.
In this exhibition, the target(person) between 0.5~7m can be monitored by this camera. This application was developed in a few weeks as an example of one POC using our ToF sensor and camera, so it still has minimal functionality. However, by developing applications based on this demonstration algorithm, we think it can be incorporated as a sensing camera for systems that require obstacle detection or self-detection. We are always interested in collaborating with companies that have expertise in this type of software development.
Editor
TOF Business Development Center
Business Development Division
Hiroki Ogawa

